Công nghệ Robocon
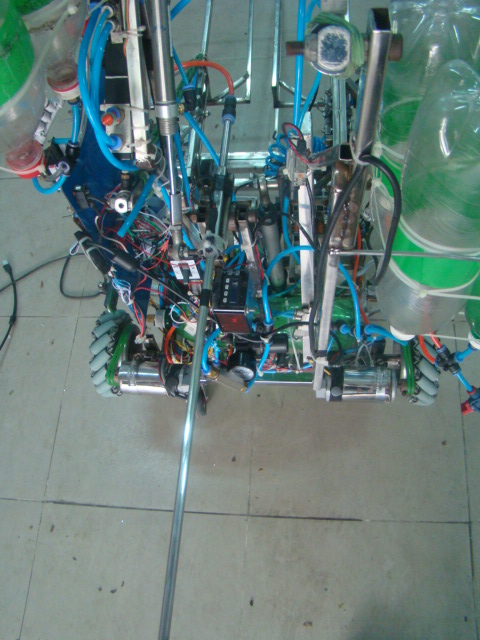
Cơ khí robot bằng tay đội vô địch LH-SEE, đội á quân LH-NVN-EAGLE, đội giải ba LH-ET* đến từ Trường đại học Lạc Hồng
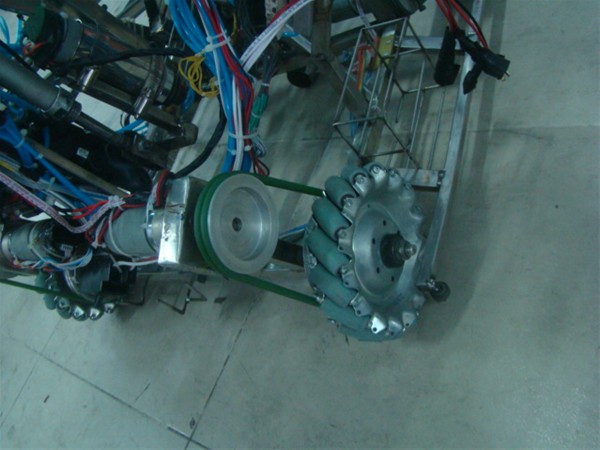
- Bánh xe chạy: 4 bánh mecanum
- Động cơ chạy: không hộp số 24V 40W encoder 500p truyền sin giữa động cơ chạy và bánh không qua buli trung gian.
- Đường kính Buli: buli động cơ 20mm, buli bánh xe 100mm.
- Board mạch điều khiển main chính, driver của trường cung cấp. Các board mạch giao tiếp, kích van, cảm biến các đội tự làm.
Cơ cấu cơ khí
- Gấp 6 khối một lần chia thành hai thanh mỗi bên 3 khối, tay gấp dạng chữ UU hai bên và giữ quà bằng cơ cấu đòn bẩy lấy lực của xilanh. Robot có một trụ giữa thân giúp nâng 3 khối quà lên cao bằng xilanh 150mm theo trục Z dùng khi thả 3 khối vùng bằng tay và có hai xilanh 2 bên để kéo hai tay lên độc lập.
- Cơ cấu trượt dài dùng động cơ kéo và hộp trượt để thả 3 khối vùng bằng tay.
- Cơ cấu bắn: nằm ở giữa phía sau đuôi robot, khi bắn mầm robot phải xoay 180 độ.
- Lấy mầm bằng cách đúc nồng bắn vào mầm lấy mầm rồi nâng lên đúng góc, chỉnh khí và bắn.
“ Green planet ”.
 |
 |
 |
 |
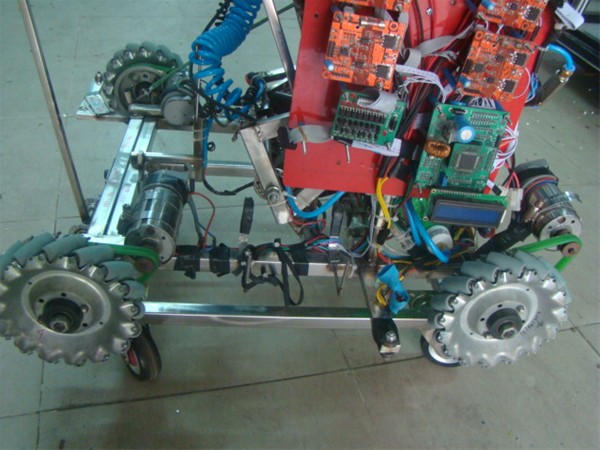
2. Robot bằng tay LH-NVN-EAGLE
- Bánh xe chạy: 4 bánh mecanum
- Động cơ chạy: không hộp số 24V 40W encoder 400p truyền sin giữa động cơ chạy và bánh qua buli trung gian tỉ lệ 2-4.
- Đường kính Buli: buli động cơ 20mm, buli bánh xe 100mm.
- Board mạch điều khiển main chính, driver của trường cung cấp. Các board mạch giao tiếp, kích van, cảm biến các đội tự làm.
Cơ cấu cơ khí
- Tay gấp lấy 6 khối theo kiểu tay kẹp độc lập. Mỗi tay có hai hình bán nguyệt để ôm lấy quà. Không có trụ giữa thân mà chỉ có hai xilanh nối với nhau để tạo ra 2 vị trí thấp và cao khi thả quà vùng bằng tay. Có khả năng hai tay nâng lên đọc lập làm robot vững khi di chuyễn với tốc độ cao.
- Cơ cấu trượt dài dùng động cơ kết hợp xilanh nối tiếp và cùng với hộp trượt để đưa quà ra xa.
- Cơ cấu bắn: nằm ở giữa phía sau đuôi robot, khi bắn mầm robot phải xoay 180 độ.
- Lấy mầm bằng cách dùng một tay gấp để gấp mầm cho vào nồng bắn, nồng bắn đã đúng góc, chỉnh khí và bắn. “ Green planet ”.
 |
 |
 |
 |
 |
 |
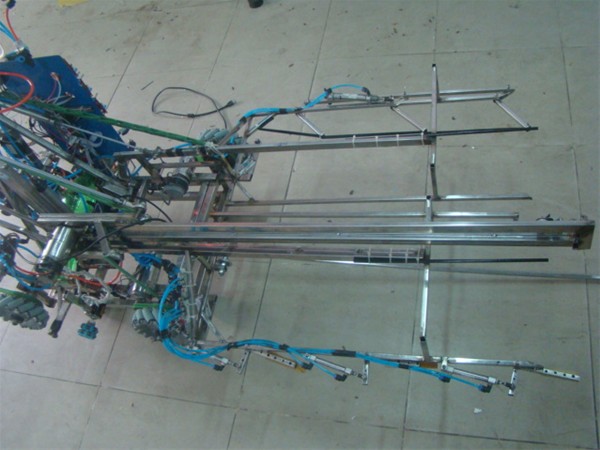
3. Robot bằng tay LH-ET*
- Bánh xe chạy: 4 bánh mecanum
- Động cơ chạy: Planet có hộp số 24V60W, encoder 13p, hệ số giảm tốc 19.2k, tốc độ sau bộ giảm tốc 468 vòng/phút truyền sin giữa động cơ chạy và bánh không qua buli trung gian.
- Đường kính Buli: buli động cơ 60mm, buli bánh xe 100mm.
- Board mạch điều khiển hoàn toàn tự chế tạo.
Cơ cấu cơ khí
- Tay gấp 6 khối một lần, cánh trái 3 khối không nâng lên mà trượt ra vào bằng xilanh nối nhau, giữa robot giữ 3 khối nâng lên bằng xilanh được bố trí hơi nghiêng để khi trượt xa thì các khối quà sẽ tự trượt cao lên lúc thả quà trong vùng bằng tay.
- Cơ cấu trượt dài dùng động cơ kết hợp bắn trượt bằng dây thun để đưa quà ra xa.
- Cơ cấu bắn được đặt phía bên phải robot tạo độ cân bằng khi di chuyển và bắn trực diện không cần xoay 180 độ, được kết hợp với tay gấp mầm để đưa mầm vào ngay nồng bắn và khai hỏa.
“ Green planet ”.
 |
 |
 |
 |
 |
 |
robocon, lachong, khác nhau, so sánh, tin tức

